 رسااندیشان موج پرداز طراح و سازنده تجهیزات پیشرفته تصویربرداری
رسااندیشان موج پرداز طراح و سازنده تجهیزات پیشرفته تصویربرداری به عبارتی زاویه دید با عمق دید نسبت عکس دارند، هر چه زاویه دید بالاتر رود، عمق دید پایین تر می آید و هر چه زاویه دید پایین تر بیاید، عمق دید بالاتر می رود.لازم به ذکر است لنز wide به دلیل زاویه دید بالا انتخاب می شود نه به دلیل عمق دید پایین و به همین ترتیب لنز های TELE (لنزهایی با فاصله کانونی بالا) به دلیل عمق دید بالا. در تمامی لنز ها یک بخش به نام آیریز وجود دارد که کار آن تنظیم نور عبوری از لنز (در محیط ها و ساعات مختلف شبانه روز) می باشد. در برخی از لنز ها، آیریز به صورت خود کار تنظیم می گردد (Auto iris) ودوربین هایی که از این سری لنز ها استفاده می کنند قادر خواهند بود در تمامی ساعات شبانه روز تصویری کاملا واضح و ایدهآل را ارسال کنند. در برخی دیگر از لنزها آیریز به صورت دستی تنظیم می گردد (manual iris) و دوربین هایی که از این سری لنز ها استفاده می کنند، فقط قادر خواهند بود در نوری تصویر شفاف و واضح ارائه دهند که آیریز آن ها بر اساس آن تنظیم گشته است و با تغییر نور نسبت به میزان تغییر، تصویر از حالت عادی خارج می شود. نکته مهم در انتخاب دوربین ها میدان دید آن است که توسط دو مولفه فاصله کانونی Focal length و ابعاد سنسور تصویر Image sensor تعیین می گردد. فاصله کانونی به معنی فاصله نقطه کانونی لنز از نقطه ورود نور به داخل لنز می باشد و نقطه کانونی نقطه ای است که درآن تمام نورهای ورودی به لنز تجمیع می گردند . هرچه فاصله کانونی زیادتر باشد میدان دید کمتر می شود .بهترین و سریعترین راه برای انتخاب نقطه و فاصله کانونی استفاده از محاسبه کننده های موجود برای این کار است (به صورت خط کش و یا برنامه کامپیوتری ) موجود است.
محدودهی دینامیکی سیگنال چیست؟
یکی از معیارهای مهم سنجش حساسیت سیگنال گستره دینامیکی میباشد. گستره دینامیکی بصورت نسبت حداکثر ظرفیت پیکسل بر حسب الکترون به اندازه موثر نویز بر حسب الکترون تعریف میشود. این عدد را میتوان برحسب دسیبل بر مبنای ده نیز بیان نمود. در واقع این نسبت عبارت است از تفاوت مقدار روشنایی بین تاریکترین نقاط و روشنترین نواحی عکس که دارای جزئیات قابل تشخیص باشند. در برخی عکسها نواحی تاریک یا روشن بعضاً دارای جزئیات هستند و در برخی قسمتها فاقد جزئیات یا بافت قابل تشخیص. محدوده دینامیکی عکس درواقع مشخص میکند که در عکس چه طیفی از روشنایی بین تاریکترین قسمتهای حاوی جزییات تا روشنترین قسمتها وجود دارد. هر چقدر این فاصله بیشتر باشد، عکس دارای محدوده دینامیکی بیشتری است و در آن نواحی بیشتری در قسمتهای تاریک و روشن دارای جزییات قابل تشخیص هستند. محدوده دینامیکی یک CCD (برحسب dB-دسی بل) از رابطه زیر بدست می آید:
(حداکثر ولتاژ نویز در کمینه شدت نور /حداکثر ولتاز سیگنال در بیشینه شدت نور ) 20Log = محدوده دینامیکی
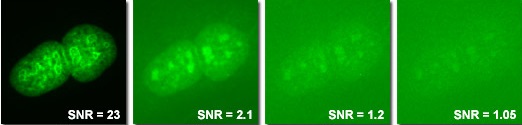
جهت دستیابی به تصویری بهتر باید محدوده دینامیکی حداکثر باشد. حد پایین رنج دینامیکی در یک سیستم تصویربرداری بر اساس نویز تنظیم میشود. شکل زیر نشان دهنده میزان تاثیر محدوده دینامیکی بر کیفیت تصویر می باشد.
این نویزها در داخل سنسور CCD تولید میشوند و در سیگنال خروجی آن ظاهر میگردند. که عبارتند از:
- نویز ریست: این نویز، از جنس نویز حرارتی و مربوط به مقاومت گره حسگر (گیت ترانزیستوری که بارهای جمعآوری شده در CCD را به ولتاژ تبدیل میکند) میباشد.
- نویز شات: این نویز مربوط به حرکت تصادفی الکترونها در هنگام رسیدن به گره حسگر میباشد. چون نویز شات مربوط به حرکت ذاتی و طبیعی الکترونها است، نمیتوان بر آن غلبه کرد.
- نویز تاریک: این نویز ناشی از الکترونهای تولید شده در اثر حرارت در CCD است و همواره از چالشهای اصلی نویز در CCD محسوب میشود. بهترین راه کاهش این نویز، از آنجایی که منابع جریان تاریک به شدت وابسته به درجه حرارت میباشند، خنک کردن CCD میباشد. درجه خنککننده تا حد زیادی وابسته به طولانیترین زمان انتگرالگیری مطلوب وحداقل نسبت سیگنال به نویز قابل قبول است.
- نویز غیریکنواختی پیکسلها: بدیهی است در عمل نمیتوان CCD را به گونه ای ساخت که تمامی پیکسلهای آن کاملاً یکسان باشد. عدم یکسان بودن اندازهی بهره کوانتومی، ناخالصیها و تلههای بار در پیکسلها، باعث تولید ولتاژهای مختلف در شرایط شدت نور و زمان نوردهی یکسان در آنها میشود. این اختلاف را میتوان با برداشت یک تصویر از یک منبع نور کاملاً موازی و دارای شدت یکسان، و ساختن ماتریس اختلاف پیکسلها رفع کرد. این ماتریس، از تصاویر برداشته شده توسط CCD کم میشود. به این تکنیک نرمافزاری، هموار کردن گفته میشود.
- نویز غیریکنواختی جریان تاریک: اگرچه تمامی پیکسلها در اثر حرارت، تولید الکترونهای نویز تاریک میکنند، اما تعداد این الکترونهای تولیدی، در پیکسلهای مختلف، به علت عدم همسانی پیکسلها، تفاوت دارد. میتوان در شرایط کاملاً تاریک، تصویری را توسط CCD برداشته و این تصویر را به عنوان یک ماتریس، از تصاویر گرفته شده CCD، کم کرد. به این تکنیک نرمافزاری، تفریق فریم تاریک گفته میشود.
نویزهای مدارات خواندن CCD
علاوه بر نویزهای CCD، قاعدتاً مدارات الکترونیکی و مدارات راه انداز در خارج از CCD نیز دارای نویز میباشند. از جمله:
- نویز سفید: این نویز که از جنس نویز حرارتی است، ناشی از مقاومتهای گره خروجی CCD است. بهترین راه کاستن این نویز، کم کردن دما است. همچنین میتوان با افزایش خازن گره خروجی CCD، این نویز را کاهش داد.
- نویز فلیکر: این نویز، در مدارات دیجیتال که در آنها عناصر در حال خاموش و روشن شدن هستند، ایجاد میشود.
- نویز تبدیل آنالوگ به دیجیتال: در هر سیستم دیجیتال، با کوانتیزه کردن ولتاژهای آنالوگ، مقداری از اطلاعات حذف میشود. در مدار خواندن CCD، این اطلاعات همان ولتاژ خروجی CCD است که اندازه آن معرف رنگ و یا شدت نور هر پیکسل CCD است، که حذف آنها منجر به نقص تصویر میگردد که از آن به نویز ADC تعبیر میگردد.
چرا مشخصاتی مثل اندازه پیکسل، طول موثرسنسور، حداکثر فرکانس پیکسل،حداکثر فرکانس لاین، Focal Length و… برای دوربینهای RA-LSC1205-I و RA-LSC1205-P درسایت موجود نیست؟
در وب سایت و در بالای جدول مدلها مشخصات پیکسلی CCD، حداکثر فرکانس خط و طول موثر آمده است. این داده ها برای همه مدلهای این دوربین یکسان است، چون همگی از CCD واحدی بهره می برند. سایر پارامترها به سخت افزار بر می گردد که متفاوت می باشد برای مثال اندازه پیکسلی این دوربین در همه مدلها 200X14 میکرون می باشد. اما رزولوشن هر پیکسل وابسته به سخت افزار دوربین می باشد.
فاصله کانونی به لنز مورد استفاده که خود معلول فاصله دوربین از جسم مورد نظر و طول جسم می باشد، بستگی دارد. با توجه به اینکه لنز را خودتان تهیه می کنید. دوربینهای ما با مکانیسم متحرکی که دارد، امکان تیون کردن لنز و CCD را فراهم خواهد کرد تا بتوانید به فوکوس مطلوب دست پیدا کنید. به منظور محاسبه لنز می توانید روی لینک مقابل کلیک کنید. Lens Calculator
در مشخصات دوربین منظور از خروجی آنالوگ چیست؟
در آندسته از دوربینهای سیاه سفید که خروجی آنالوگ دارند شدت نور یک پیکسل خاص از طریق فرمان به دوربین روی خروجی آنالوگ آن متناظر می گردد. برای مثال شما می توانید از طریق نرم افزار شدت نور پیکسل شماره 1350 را بصورت پیوسته با اسکوپ مشاهده کنید. شدت نور ماکزیمم در این پیکسل معادل 4 ولت و شدت نور مینیمم معادل صفر ولت خواهد بود. در آندسته از دوربینهای رنگی که خروجی آنالوگ دارند شدت نور رنگ قرمز ، سبز یا آبی یک پیکسل خاص از طریق فرمان به دوربین روی خروجی آنالوگ آن متناظر می گردد. برای مثال شما می توانید از طریق نرم افزار شدت نور قرمز پیکسل شماره 1350 را بصورت پیوسته با اسکوپ مشاهده کنید. شدت ماکزیمم نور رنگ قرمز در این پیکسل معادل 4 ولت و شدت نور مینیمم معادل صفر ولت خواهد بود.
چگونه FOV و Resolution و حداقل فرکانس خط مورد نیاز را در سرعت های مختلف محاسبه کنیم؟
FOV یا میدان دید ارتباطی با سرعت حرکت جسم ندارد. رزولوشن در جهت حرکت جسم به فرکانس اسکن خط دوربین بستگی دارد. در صورتیکه جسم در جهت X و Y دچار اعوجاج نگردد و راستای حرکتی خود را کامل حفظ نماید حداقل میزان فرکانس خط از روی ماکزیمم سرعت حرکت جسم، و حداقل رزولوشن تصویربرداری از جسم تعیین می گردد.
مثال 1: محاسبه رزولوشن در جهت حرکت
عرض نوار نقاله : 550 میلی متر
رزولوشن در جهت حرکت : 0.3 میلی متر بر پیکسل
تعداد پیکسلهای مورد نیاز: کافیست عرض نوار را بر رزولوشن تقسیم کنیم. بنابراین حداقل 1833 پیکسل برای تصویربرداری مورد نیاز می باشد. با توجه به اینکه رزولوشن های نوعی دوربینهای خطی 512 ، 1024، 2048، 2700، 3648، 4096، 8192، 10680 و 12288 پیکسل می باشد. حداقل رزولوشن برای کاربرد فوق 2048 پیکسل به بالا می باشد. با استفاده از دوربین 2048 پیکسلی رزولوشن تصویربرداری ما 0.27 میلی متر در هر پیکسل می باشد.
مثال 2 : محاسبه فرکانس اسکن خط
به ازای حداکثر سرعت جابجایی جسم V، میدان دید FOV، عرض پیکسلی W و طول موثر سنسور S حداقل فرکانس خواندن خط FL برابر است با:
FL= (V * S) / (W * FOV)
منظور از Firmware Customizable در مدل P دوربینها چیست؟ یعنی اینکه چه خواسته هایی از طرف مشتری را می توانید بر روی دوربین ها سفارشی سازی کنید؟
برنامه سخت افزاری دوربین های ما بر اساس نیاز مشتریان در مدل P قابل تغییر می باشد. فرض بفرمایید یک فیلتر خاص برای Smooth کردن داده های پیکسلی مورد نیاز باشد و ….، در این صورت مدل P این امکان را برای مشتری فراهم خواهد نمود. اگر سخت افزار موجود قابلیت لازم را دارا نباشد، سخت افزار جدیدی برای این خواست مشتریانمان طراحی خواهیم نمود.
سورس کدی که مربوط به دوربین در سایت قرار داده اید مربوط به چیست و آیا می توان از آن به عنوان تشخیص رنگ پیکسل ها در هر فریم استفاده کرد؟ و سپس فرامین کنترلی بر روی سیستم های دیگر مثل اجکتورهای بادی را از طریق Ethernet یا Gigabit Ethernet و یا همان USB ارسال نمود ؟
این سورس کدها در واقع یک برنامه دمو می باشند که قابلیت ارتباط کامپیوتر با دوربین را برای شما فراهم می کند. دوربینهای خارجی فایلهای DLL ، API و مجموعه دستورات لازم برای ارتباط با دوربین را می دهند. سورس کدهای موجود در وب سایت این نیازمندیها را همزمان برای مشتریان فراهم می کنند. در نرم افزارهای دمو توسط کاربر فرمان شروع ارسال داده، گین، افست، زمان نوردهی و … برای دوربین ارسال می گردد. دوربین نیز شدت نور کلیه پیکسلها از پیکسل 1 تا پیکسل N، نرخ ارسال فریم و نرخ خواندن لاین را در یک فریم برای نرم افزار ارسال می کند.
شما می توانید روی سایر پورتهای کامپیوترتان به سیستمهای کنترلی دیگر فرمان دهید. برای مثال پس از پردازش روی داده های دوربین که از طریق USB برای شما ارسال می شود می توانید فرمان مطلوب را از طریق اترنت برای سایر سیستمها ارسال نمایید. در صورتیکه بخواهید روی همان پورت USB ارتباطی با دوربین فرمان خاصی به یک فعالساز خارجی برود، لازم است سخت افزار دوربین برای شما Customize گردد.
با توجه به حداقل زمان نوردهی یا Exposure time دوربین های موجود، آیا این دوربین ها برای کاربردهای سرعت بالا مناسب می باشد؟
با ذکر یک مثال مفهوم زمان نوردهی را برایتان تشریح می کنیم.
فرض کنید سطح CCD کامل پوشیده شده و تنها یک شکاف در فاصله ای کم و به اندازه 0.5 میلی متر عمود بر CCD قرار دارد. در صورتیکه زمان نوردهی را روی 100 میکروثانیه قرار دهیم تصویر شماره 1 و در صورتیکه آنرا روی 1 میلی ثانیه قرار دهیم تصویر شماره 2 را خواهیم داشت.
زمان نوردهی 100 میکروثانیه

زمان نوردهی 1 میلی ثانیه
همانطور که در شکلهای فوق می بینید هر چه زمان نوردهی بیشتر باشد، پیکسلهای بیشتری در معرض تابش نور پیکسلهای مجاور قرار می گیرند. البته در هر دو شکل پیکسلهای CCD در مرکز شکاف به اشباع رفته اند(پدیده بلومینگ). در صورتیکه زمان نوردهی را کمتر کنیم این پیکسلها از اشباع در می آیند.
زمان نوردهی با سرعت فرکانس خط نسبت غیر مستقیم دارد. یعنی هر چه زمان نوردهی بیشتر باشد، فرکانس خواندن خط از CCD نیز کمتر خواهد شد. در شدت نورهای کم بایستی زمان نوردهی را افزایش داد. در شدت نورهای بالا بایستی زمان نوردهی را کاهش داد تا CCD به اشباع نرود. بنابراین می توان گفت زمان نوردهی الکترونیکی دوربین از لحاظ مکانیکی همان دریچه دیافراگم یا شاتر مکانیکی دوربینها می باشد.
اما تفاوت این دوربینها با دوربینهای دوبعدی در این است که این دوربینها در یک زمان نوردهی خاص تنها یک خط را می خوانند و نه یک ناحیه دو بعدی را. بنابراین زمان نوردهی این نوع از دوربینها در کاربردهایی که منبع نور و جسم هر دو ثابت هستند با سرعت تغییرات شدت نور ارتباط خواهد داشت.
فرض کنید از یک لنز با فاصله کانونی متغیر استفاده می کنیم. در یک زوم خاص چگونه فاصله کانونی را محاسبه کنیم؟
دو راه برای اینکار وجود دارد، یکی متر کشی و عکاسی از یک سوژه در دو فاصلهی مختلف از لنز است که این کار بهنظر ساده میآید اما اگر نتیجهی قابلِ قبولی میخواهید به ابزار بسیار دقیق و Setup مرتب نیاز دارد.
بهطور خلاصه، شما از یک سوژه دو عکس میگیرید و سپس اندازهی بزرگ نمایی را بر اساس تصویر حاصله را محاسبه میکنید (میتوانید در فتوشاپ عکسها را اندازه بگیرید و نسبت را بهدست آورید، به این نسبت میگوییم m)، بعد هم مقدار جابهجایی سوژه برای رسیدن به این بزرگنمایی را بهدست میآورید (یعنی از سوژه تا مثلاً سنسور را دوبار متر میکنید، این را میگوییم Δd) بعد فاصلهی کانونی خیلی ساده با استفاده از این رابطه بهدست میآید:
Δd
فاصلهی کانونی = -------------
1
m - ----
mاما برای این اندازهگیری ابزار دقیق مترکشی لازم دارید چون خطای یک سانتیمتری ابزار میتواند Δd شما را تا ۲۰ میلیمتر تغییردهد!
راه دوم اما بهتر و معقولتر است، از یک سوژه که دو نقطهی مشخص در بینهایت آن وجود دارد، با فوکوس بینهایت عکس بگیرید، حال اگر فاصلهی زاویهای آن دو نقطه (میگوییم θ) را بدانید:
طول دو نقطه روی تصویر
فاصلهی کانونی = ------------------------
57.2957795 * θاندازه گرفتن فاصلهی دو نقطه در فتوشاپ که آسان است، فقط مساله اینجاست که این عدد باید اندازهی دقیق فاصله روی سنسور شما باشد، سادهترین راهِ محاسبه، اندازهگرفتن تعداد پیکسلها بین دو نقطه در فتوشاپ است (یا اگر مختصات اینها را داشتهباشد با هندسهی تحلیلی ابتدایی یافتن این فاصله سادهاست) و بعد با توجه به مشخصات سنسور تبدیل این پیکسلها به اندازهی واقعی است، (مثلا طول سنسور را بگیرید و تقسیم بر تعداد پیکسلهای طول کنید، یا با توجه به مساحت این را حساب کنید یا از عدد منتشر شده توسط سازنده به عنوان اندازهی پیکسل استفاده کنید، که اگر میکرون است آن را به میلیمتر تبدیل کنید و …)
آن عدد 57.2957795 هم که در واقع ۱۸۰ است تقسیم بر عدد پی برای تبدیل از درجه به رادیان، میماند خود θ . محاسبهی θ سادهاست. اگر تصویر را در فوکوس بینهایت یعنی 3 تا 5 متری ثبت کنید، تانزانت θ تقریبا برابر است با θ که می شود نصف طول جسم تقسیم بر فاصله